الأشياء المستخدمة في هذا المشروع
4-digit 7-segment display
بوش بتن- مفتاح الضغط
صافرة كهربائية - بزر
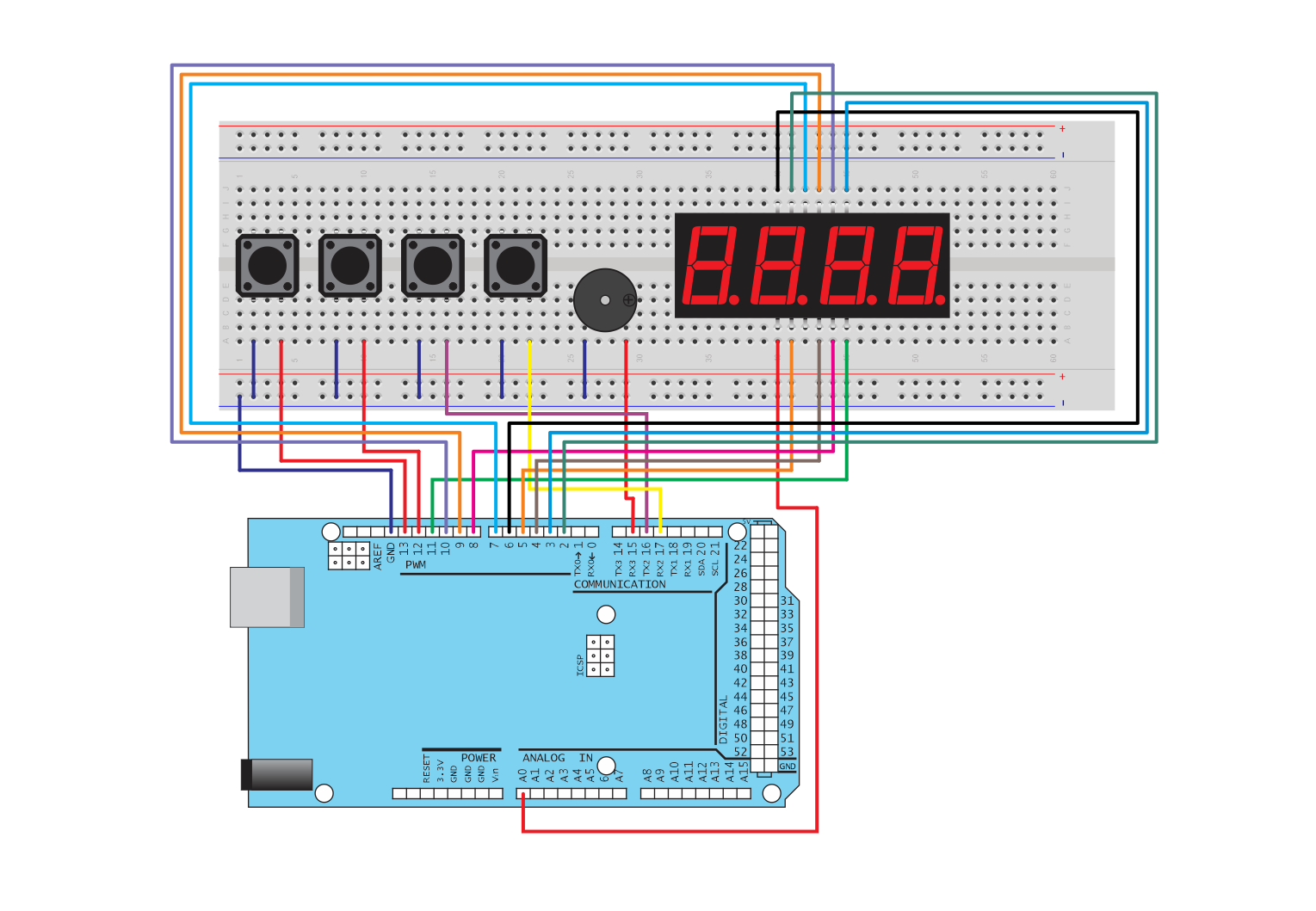
من المحتمل أن يكون مؤقت العد التنازلي هو المشروع الأكثر طبيعية للعرض المكون من 4 أرقام المكون من 7 أرقام. أثناء استكشاف ما هو متاح عبر الإنترنت ، عثرت على العديد من المشاريع ، ولكن لم أجد المشروع الذي كان يدور في خلدي ، وهو مؤقت العد التنازلي القابل للتعديل المستقل الذي يمكنك ضبطه بسهولة باستخدام الأزرار (وليس عن طريق تحميل رمز معدل). لذلك قررت أن أصنع واحدة.
قضيت بعض الوقت في كتابة رمز يجعل من السهل استخدام وتعديل المؤقت ، بحيث يمكن استخدامه عمليًا.
يمكن أيضًا استخدام الرمز المتضمن في مشاريع أخرى مع عرض مكون من 4 أرقام مكون من 7 أجزاء. على وجه الخصوص ، لديه الوظيفة التي تعرض رقم معين (0-9999) لفاصل زمني معين. ربما تكون هذه الوظيفة موجودة في بعض المكتبات ، لكن البحث السريع لم يكشف عنها. نظرًا لأن برمجة هذا العرض صعبة بعض الشيء (حيث يمكنك إظهار رقم واحد فقط في كل مرة) ، فإن هذه الوظيفة مفيدة حقًا.
التعريفات
كود الترميز
#include <math.h> int digit_pin[] = {6, 9, 10, 11}; // PWM Display digit pins from left to right int speakerPin = 15; #define DIGIT_ON LOW #define DIGIT_OFF HIGH int segA = 2; int segB = 3; int segC = 4; int segD = 5; int segE = A0; //pin 6 is used bij display 1 for its pwm function int segF = 7; int segG = 8; //int segPD = ; int button1=13; int button2=12; int button3=16; int button4=17; int countdown_time = 60; struct struct_digits { int digit[4]; }; void setup() { pinMode(segA, OUTPUT); pinMode(segB, OUTPUT); pinMode(segC, OUTPUT); pinMode(segD, OUTPUT); pinMode(segE, OUTPUT); pinMode(segF, OUTPUT); pinMode(segG, OUTPUT); for (int i=0; i<4; i++) { pinMode(digit_pin[i], OUTPUT); } pinMode(speakerPin, OUTPUT); pinMode(button1,INPUT_PULLUP); pinMode(button2,INPUT_PULLUP); pinMode(button3,INPUT_PULLUP); pinMode(button4,INPUT_PULLUP); } void playTone(int tone, int duration) { for (long k = 0; k < duration * 1000L; k += tone * 2) { digitalWrite(speakerPin, HIGH); delayMicroseconds(tone); digitalWrite(speakerPin, LOW); delayMicroseconds(tone); } } void lightNumber(int numberToDisplay) { #define SEGMENT_ON HIGH #define SEGMENT_OFF LOW switch (numberToDisplay){ case 0: digitalWrite(segA, SEGMENT_ON); digitalWrite(segB, SEGMENT_ON); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_ON); digitalWrite(segE, SEGMENT_ON); digitalWrite(segF, SEGMENT_ON); digitalWrite(segG, SEGMENT_OFF); break; case 1: digitalWrite(segA, SEGMENT_OFF); digitalWrite(segB, SEGMENT_ON); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_OFF); digitalWrite(segE, SEGMENT_OFF); digitalWrite(segF, SEGMENT_OFF); digitalWrite(segG, SEGMENT_OFF); break; case 2: digitalWrite(segA, SEGMENT_ON); digitalWrite(segB, SEGMENT_ON); digitalWrite(segC, SEGMENT_OFF); digitalWrite(segD, SEGMENT_ON); digitalWrite(segE, SEGMENT_ON); digitalWrite(segF, SEGMENT_OFF); digitalWrite(segG, SEGMENT_ON); break; case 3: digitalWrite(segA, SEGMENT_ON); digitalWrite(segB, SEGMENT_ON); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_ON); digitalWrite(segE, SEGMENT_OFF); digitalWrite(segF, SEGMENT_OFF); digitalWrite(segG, SEGMENT_ON); break; case 4: digitalWrite(segA, SEGMENT_OFF); digitalWrite(segB, SEGMENT_ON); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_OFF); digitalWrite(segE, SEGMENT_OFF); digitalWrite(segF, SEGMENT_ON); digitalWrite(segG, SEGMENT_ON); break; case 5: digitalWrite(segA, SEGMENT_ON); digitalWrite(segB, SEGMENT_OFF); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_ON); digitalWrite(segE, SEGMENT_OFF); digitalWrite(segF, SEGMENT_ON); digitalWrite(segG, SEGMENT_ON); break; case 6: digitalWrite(segA, SEGMENT_ON); digitalWrite(segB, SEGMENT_OFF); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_ON); digitalWrite(segE, SEGMENT_ON); digitalWrite(segF, SEGMENT_ON); digitalWrite(segG, SEGMENT_ON); break; case 7: digitalWrite(segA, SEGMENT_ON); digitalWrite(segB, SEGMENT_ON); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_OFF); digitalWrite(segE, SEGMENT_OFF); digitalWrite(segF, SEGMENT_OFF); digitalWrite(segG, SEGMENT_OFF); break; case 8: digitalWrite(segA, SEGMENT_ON); digitalWrite(segB, SEGMENT_ON); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_ON); digitalWrite(segE, SEGMENT_ON); digitalWrite(segF, SEGMENT_ON); digitalWrite(segG, SEGMENT_ON); break; case 9: digitalWrite(segA, SEGMENT_ON); digitalWrite(segB, SEGMENT_ON); digitalWrite(segC, SEGMENT_ON); digitalWrite(segD, SEGMENT_ON); digitalWrite(segE, SEGMENT_OFF); digitalWrite(segF, SEGMENT_ON); digitalWrite(segG, SEGMENT_ON); break; case 10: digitalWrite(segA, SEGMENT_OFF); digitalWrite(segB, SEGMENT_OFF); digitalWrite(segC, SEGMENT_OFF); digitalWrite(segD, SEGMENT_OFF); digitalWrite(segE, SEGMENT_OFF); digitalWrite(segF, SEGMENT_OFF); digitalWrite(segG, SEGMENT_OFF); break; } } void SwitchDigit(int digit) { for (int i=0; i<4; i++) { if (i == digit) { digitalWrite(digit_pin[i], DIGIT_ON); } else { digitalWrite(digit_pin[i], DIGIT_OFF); } } } struct struct_digits IntToDigits(int n){ struct struct_digits dig; int zeros=0; int d; for (int i=0; i<4; i++) { d=n/pow(10,3-i); zeros += d; n = n - d*pow(10,3-i); if (zeros!=0 || i==3) { dig.digit[i]=d; } else { dig.digit[i]=10; } } return dig; } void PrintNumber(int n, int time) { struct struct_digits dig; dig = IntToDigits(n); for (int i=0; i<= time/20; i++) { if (digitalRead(button2)==LOW) { return; } for (int j=0; j<4; j++) { SwitchDigit(j); lightNumber(dig.digit[j]); delay(5); } } } bool Countdown(int n, int del){ for (int q=n; q>0; q--){ PrintNumber(q,del); if (digitalRead(button2)==LOW) { return false; } } PrintNumber(0,0); playTone(1519,1000); return true; } void reset() { int m, zeros, d, pressed3 = 0, pressed4 = 0; m=countdown_time; struct struct_digits dig; dig = IntToDigits(countdown_time); while (digitalRead(button1)==HIGH) { for (int j=0; j<4; j++) { SwitchDigit(j); lightNumber(dig.digit[j]); delay(5); } if (digitalRead(button3)==LOW) { if (pressed3 == 0 || pressed3 > 30) { if (countdown_time > 0) { countdown_time -= 1 ; } dig = IntToDigits(countdown_time); } pressed3 += 1; } else if (digitalRead(button4)==LOW) { if (pressed4 == 0 || pressed4 > 30) { if (countdown_time <9999) { countdown_time += 1 ; } dig = IntToDigits(countdown_time); } pressed4 += 1; } if (digitalRead(button3)==HIGH) { pressed3=0; } if (digitalRead(button4)==HIGH) { pressed4=0; } } } void loop(){ reset(); while (!Countdown(countdown_time,962)) { reset(); } while (digitalRead(button2)==1){}; }