الموقع الرابع
Simuino Arduino Simulator
يمكنك تحميل النسخة النهائية (الإصدار الأخير هو v0.1.9) في www.simuino.com. ملاحظة: التنزيلات المتوفرة على code.google.com ليست الأحدث!
تشغيل رسم وتقييم في / خارج حالة من دبابيس الرقمية والتناظرية. ويستند واجهة المستخدم الرسومية على نكورسيس، أي تشغيل سيموينو من نافذة المحطة الطرفية. ميزات الرسوم المتحركة في الوقت الحقيقي وفقا لتأخير الفعلي في رسم.
أداة مثالية لأي شخص يريد أن تبدأ مع اردوينو رسم البناء.
ومن الممكن أيضا لبناء سيناريوهات بشأن أنالوغريد، ديجيتالريد و المقاطعات الخارجية.
والغرض من ذلك هو جعل بناء رسم أسهل. يمكنك التحقق من وظيفة دون وجود لوحة اردوينو المتاحة. سيموينو يدير رسم ويظهر حالة الرقمية، دبابيس التناظرية والمخرجات المسلسل.
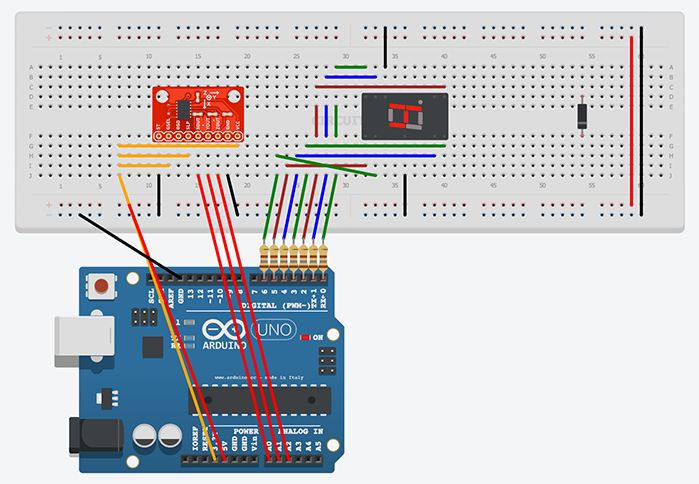
لوحة افتراضية لاردوينو:
أطلقت في عام 2005، نمت اردوينو الأجهزة والبرمجيات منصة مفتوحة لتكون شعبية جدا بين الهواة والمربين والمهنيين على حد سواء، تكتسب زخما وخاصة في مجال الروبوتات. بدعم من مجتمع ضخم على الانترنت، ومع معظم مجالس التطوير وملحقات الأجهزة المتاحة بأسعار منخفضة جدا، قد يكون هذا المنبر أفضل مكان للبدء في العمل مع الأجهزة المضمنة. ولكن ماذا لو كنت تريد أن تتعلم البرمجة ولا تملك لوحة اردوينو، أو تطغى عليها اختيار الأجهزة هناك؟ هذا هو المكان الذي يأتي برامج المحاكاة في.
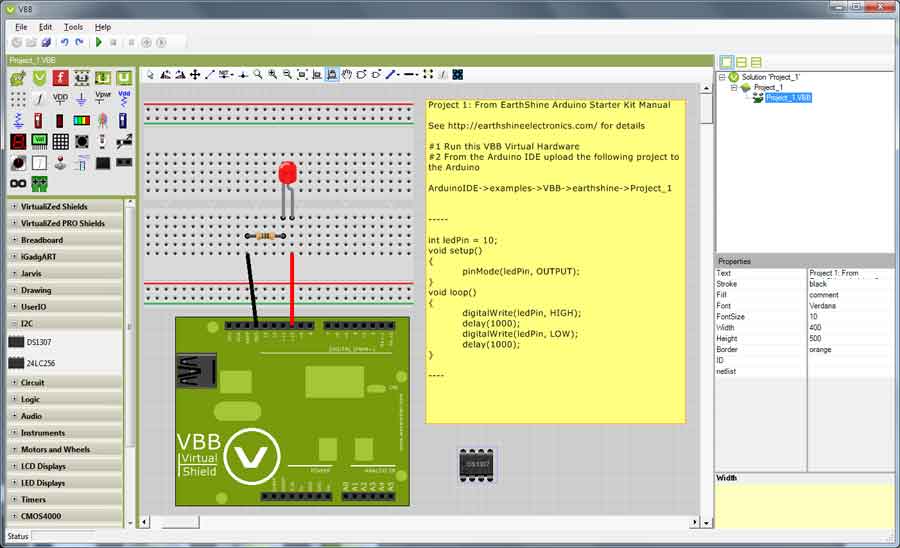
الظاهري اللوح لاردوينو هو التطبيق التعلم مصممة لمساعدتك على اتخاذ الخطوات الأولى في عالم مثير من الحوسبة المادية مع متحكم اردوينو و "اللوح" نماذج الدوائر الإلكترونية القائمة.
اردوينو محاكاة فب
مع VBB4Arduino سوف
• تعلم من 75 بنيت في أمثلة اردوينو
• استكشاف العشرات من أنواع مختلفة من أجهزة الاستشعار والمحركات والأضواء
• تعلم أوامر اردوينو
• تحرير أمثلة التعليمات البرمجية الخاصة بك
تحميل الظاهري اللوح أردوينو محاكي طالب الإصدار
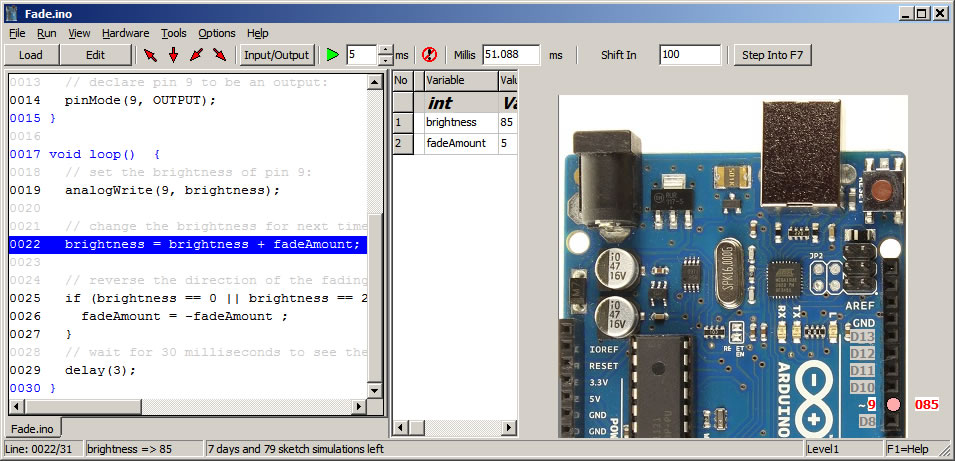
محاكاة لاردوينو التي كتبها فيرترونيكش
محاكي لاردوينو هو الأكثر اكتمالا اردوينو محاكي المتاحة في الوقت الحاضر (مشاهدة أحدث الفيديو أدناه).
اردوينو محاكاة من قبل فيرترونيكس
فوائد وخصائص محاكي اردوينو هي:
القدرة على تعليم وإظهار الأعمال الداخلية لرسم اردوينو
اختبار رسم بدون الأجهزة، أو قبل شراء الأجهزة
تصحيح تصحيح
إظهار مشروع للعميل المحتمل
وضع رسم معقدة أسرع من استخدام الأجهزة
تحميل نسخة مجانية أدناه مع توقيت تأخير قصير على تحميل رسم، وعندما الترقية جاهزة إلى الإصدار برو. يستخدم محاكي لاردوينو برو النسخة حاليا في العديد من البلدان أكثر من ست قارات. يتكون التحميل من ملف مضغوط يحتوي على ملف setup.exe الذي يقوم بتثبيت ملف إكس وملفات المساعدة والصور والأمثلة. وهي مصممة لاردوينو أونو، ميجا ومعظم لوحات اردوينو المشتركة الأخرى، ولا ما يلي:
الخطوات من خلال خط البرنامج سطرا. إذا تم تحديد سطر جديد، سيستمر البرنامج من تلك النقطة.
ينفذ ديجيتالوريت، ديجيتالريد و بينمود لدبابيس 0-53
أنالوغريد للدبابيس 0-16 و أنالوغوريت للدبابيس الرقمية 0-53
يحاكي المسلسل، خرج لد، إيثرنت، مضاعفات، بطاقة سد، إيبروم، سوفتسيريال، سبي، سلك
إذا، في حين، ل، التبديل، القيام وظيفة في حين
سوبروتينس (متعدد المستويات) مع وسيطات
عرض المتغيرات في الوقت الحقيقي
خطوة إلى، خطوة أكثر، الخروج من أو تشغيل الوضع
القدرة على تحرير رسم أو فتح في اردوينو إيد
علامات التبويب لملفات منفصلة في رسم
مساعدة حساسة للسياق
2 و 4 خط دعم لد فقط مع مرتجلة كرام
2 المصفوفات الأبعاد (دون إنيتياليسيشن)
بريكبوانت الآن مع خيار الشرطي
تحميل مكتبات مخصصة تلقائيا بعد وضع دليل المكتبة
تغيير الخط وحجم وأسلوب المحاكي
ساعة متطورة للعرض السهل المتغير
تقليل وضع التجريبي / التدريب
دعم محدود للمكتبات المخصصة
دعم محدود للمؤشر والهياكل
محددات :
المؤشرات التي لم تنفذ - بعض الرسومات مع مؤشرات قد تعمل ولكن المؤشرات عموما لا تعمل
المكتبات المخصصة، والهياكل، والطبقات و إنومز قد أو قد لا تعمل
قضايا ثانوية أخرى تتعلق بأوامر C ++ المعقدة
فرماتا يحتاج العمل
سيتم تشغيل كائن الماوس ولكن لم يتم تنفيذه بعد
مؤشرات وظيفة تيبديف لم تنفذ
ماك، واجهة يوس لم تنفذ
يعمل تيبديف بسيطة ولكن تيبديف مع إنوم أو ستروكتس ليتم تنفيذها
محاكاة لاردوينو التي كتبها فيرترونيكش
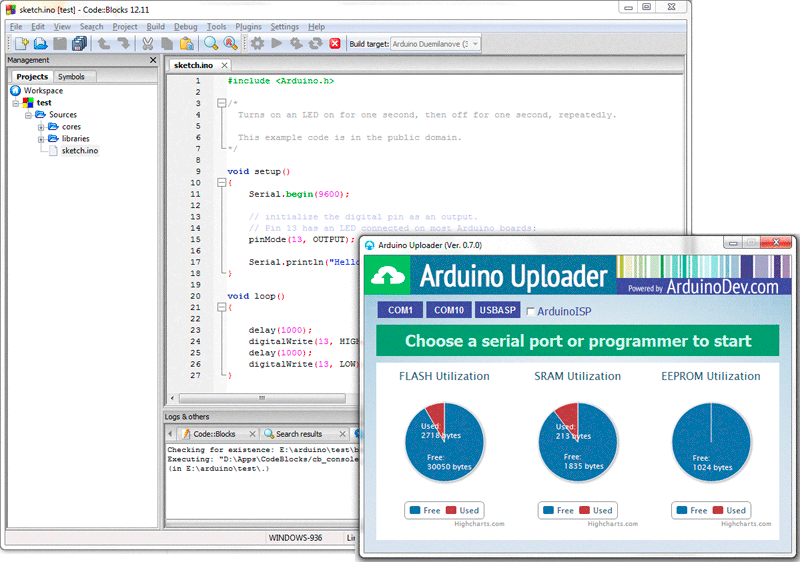
كوديبلوكس اردوينو إيد مع محاكي:
كوديبلوكس اردوينو إيد هو توزيع مخصص من التعليمات البرمجية مفتوحة المصدر :: كتل إيد تعزيز لتطوير اردوينو. فإنه يوفر مطوري البرمجيات أكثر تطلبا مع كل ما ينبغي أن يكون إيد الحديثة بما في ذلك مجلد التعليمات البرمجية، رمز الانتهاء، كود نافيجياتيون، تجميع فضلا عن تحميل لاردوينو. مع معالج مشروع مخصص، فإنه من السهل إنشاء مشروع أردوينو جاهزة للذهاب. توزيع يدمج أحدث الملفات الأساسية اردوينو، والمكتبات اردوينو القياسية، أفر تولشين، اردوينو منشئ، محطة تسلسلي والأكثر إثارة للاهتمام، على أبي على مستوى اردوينو محاكاة (قيد التطوير).
رمز كتلة إيد مع محاكاة
رمز كتلة إيد مع محاكاة
ميزات:
معالج مشروع مخصص لتطوير اردوينو
متكاملة الملفات الأساسية اردوينو والمكتبات
تجميع الملفات الأساسية المخزنة مؤقتا لسرعة تجميع أسرع (مقارنة الأصلي اردوينو إيد)
المتكاملة قبل تكوين أفر مترجم تولشين
شعبية لوحات اردوينو دعم كأهداف البناء
تحميل هيكس لوحات اردوينو (ليوناردو معتمدة) من خلال تشغيل الهدف بنيت
اردوينو أبي المستوى